INAV Ez-Tune is a user-friendly, integrated tuning system built into the INAV firmware. It streamlines the process of dialing in your drone’s performance.

Traditionally, tuning a flight controller meant adjusting a multitude of separate parameters:
- PID gains for each axis separately
- filter frequencies
- and other nuanced settings
Each of which could mean a steep learning curve and potential for error. With Ez-Tune, many of these individual adjustments are consolidated into a handful of intuitive sliders (typically eight or nine), which makes balancing the drone’s flight characteristics much simpler and more accessible .
Instead of fluctuating between different configuration screens and guessing the best settings, pilots can now make real-time adjustments during test flights
The slider-based approach dynamically manipulates underlying parameters to give you a smoother setup process—whether you’re aiming for more aggressive maneuvers or a steadier, more efficient flight. It essentially takes the guesswork out of traditional tuning by automating some of the intricate balancing act usually required .
Moreover, with newer versions of INAV, Ez-Tune has become the default tuning method for multirotor drones, underscoring its reliability and ease of use. Its design reflects a broader trend in drone firmware: making high-performance tuning accessible to both beginners and seasoned pilots alike. This empowerment allows you to focus more on flying and less on the technical intricacies of fine-tuning your drone’s performance.
Ez-Tune parameters
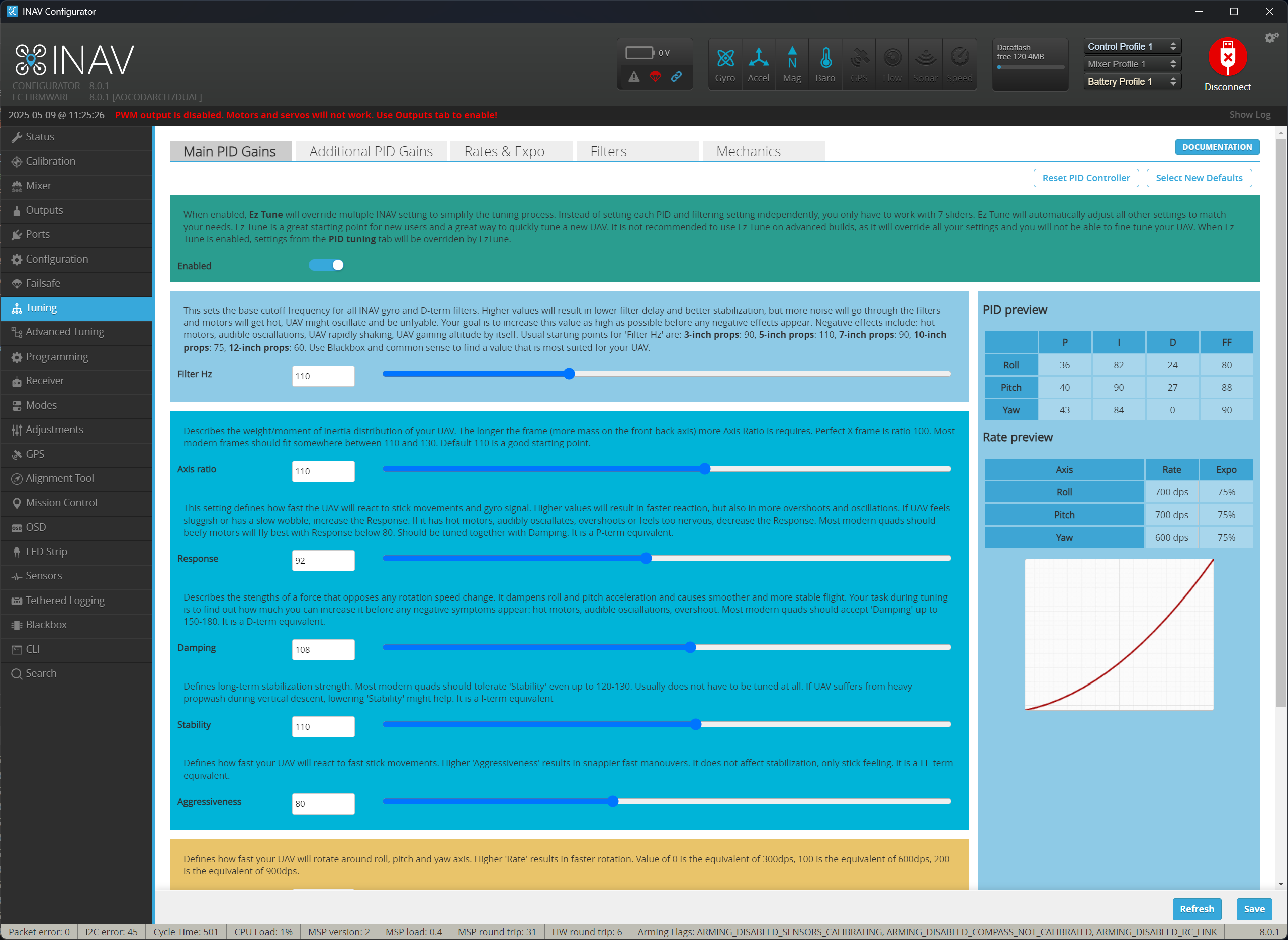
Filter Hz
This sets the base cutoff frequency for all INAV gyro and D-term filters. Higher values will result in lower filter delay and better stabilization, but more noise will go through the filters and motors will get hot, UAV might oscillate and be unfyable.
The goal is to increase this value as high as possible before any negative effects appear. Negative effects include:
- hot motors
- audible osciallations
- UAV rapidly shaking
- UAV gaining altitude by itself
Usual starting points for Filter Hz are:
- 3-inch props: 90
- 5-inch props: 110
- 7-inch props: 90
- 10-inch props: 75
- 12-inch props: 60
Use Blackbox and common sense to find a value that is most suited for your multirotor drone.
Axis Ratio
Describes the weight/moment of inertia distribution of your FPV drone. The longer the frame (more mass on the front-back axis) more Axis Ratio is requires. Perfect X frame is ratio 100.
Most modern frames should fit somewhere between 110 and 130. Default 110 is a good starting point. I majority of cases, there is no need to tune this parameter much.
Response
This setting defines how fast the UAV will react to stick movements and gyro signal. Higher values will result in faster reaction, but also in more overshoots and oscillations.
- If your drone feels sluggish or has a slow wobble, increase the Response.
- If it has hot motors, audibly osciallates, overshoots or feels too nervous, decrease the Response.
Most modern quads with beefy motors will fly best with Response below 80. Should be tuned together with Damping.
It is a P-term equivalent.
Damping
Describes the stengths of a force that opposes any rotation speed change. It dampens roll and pitch acceleration and causes smoother and more stable flight. Your task during tuning is to find out how much you can increase it before any negative symptoms appear: hot motors, audible osciallations, overshoot.
Most modern quads should accept ‘Damping’ up to 150-180.
It is a D-term equivalent.
Stability
Defines long-term stabilization strength. Most modern quads should tolerate ‘Stability‘ even up to 120-130. Usually does not have to be tuned at all. If a drone suffers from heavy propwash during vertical descent, lowering ‘Stability’ might help.
Stability is a I-term equivalent
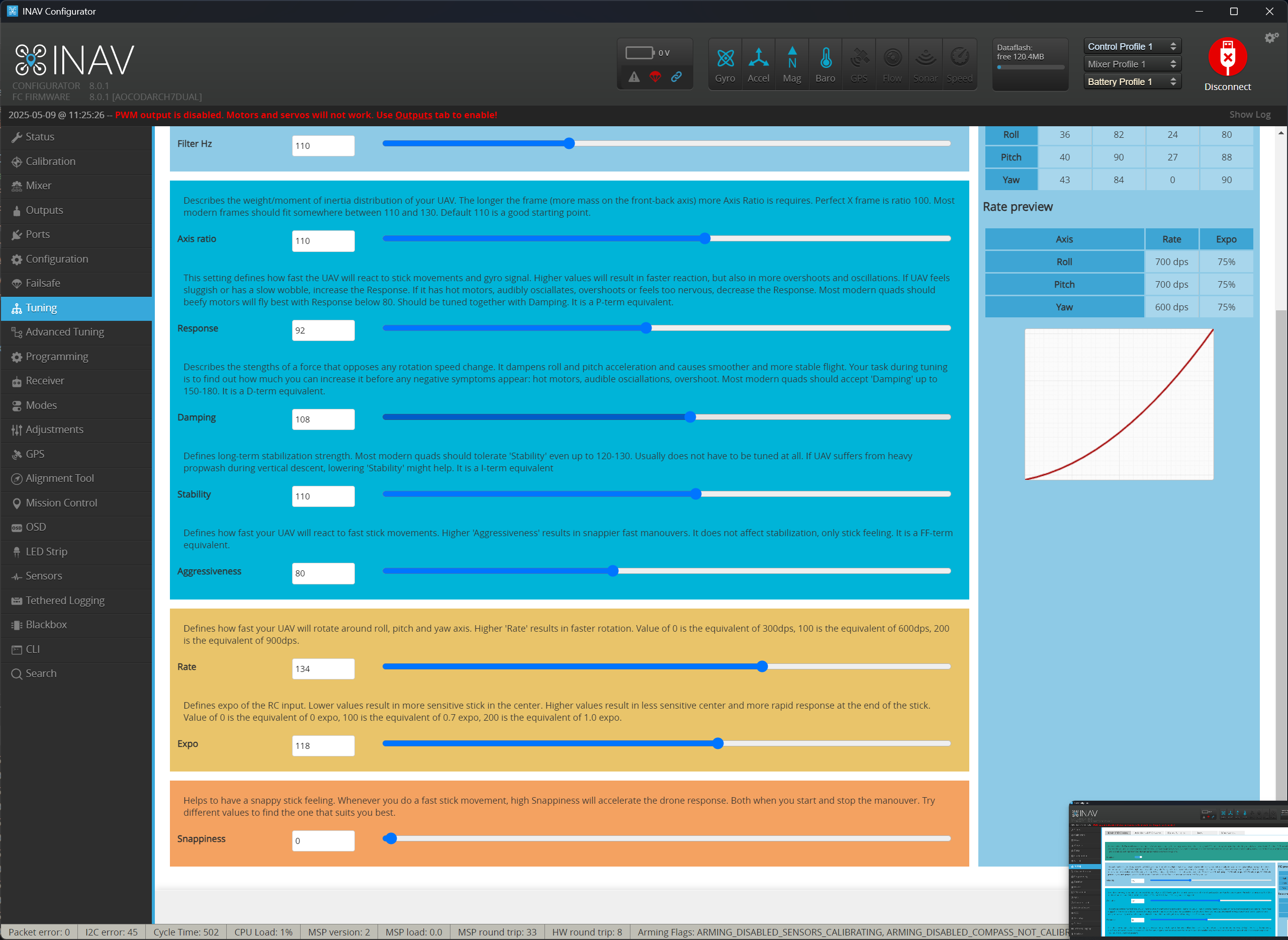
Aggressiveness
Defines how fast your drone will react to fast stick movements. Higher ‘Aggressiveness‘ results in snappier fast manouvers. It does not affect stabilization, only stick feeling.
Aggressiveness is a FF-term equivalent
Snappiness
Helps to have a snappy stick feeling. Whenever you do a fast stick movement, high Snappiness will accelerate the drone response. Both when you start and stop the manouver. Try different values to find the one that suits you best
Internally, Snappiness, dampens D-term when you quickly move roll and pitch sticks. This allows much faster response and a “snap” when you quickly deflect or center the sticks. And yes, this snap is actually audible and if you raise Snappiness, you will hear it.
Important, Snappiness works ONLY when stick position changes. It’s not active when stick is held center or in any other position.
Rate & Expo
Well, Rate and Expo are self explanatory. There is no hidden meaning is this. Ez-Tune rate and expo solve a problem “how much rate is a lot”. Advanced pilots will know 700, 800 or 1000 degrees per second is their preferred value. But novice? This is why, 100 is an “average” and then you can go up or down from there to suit your needs.

Summary
Ez-Tune not only makes initial setup more straightforward but also enables quick adjustments as flight conditions or performance desires change. Its simplicity is a significant advantage, especially during live tuning sessions, where immediate feedback is crucial. After all, it’s simpler to adjust 9 parameters with predefined defaults than dozens of settings, often duplicated for each axis





