Tag: INAV
-
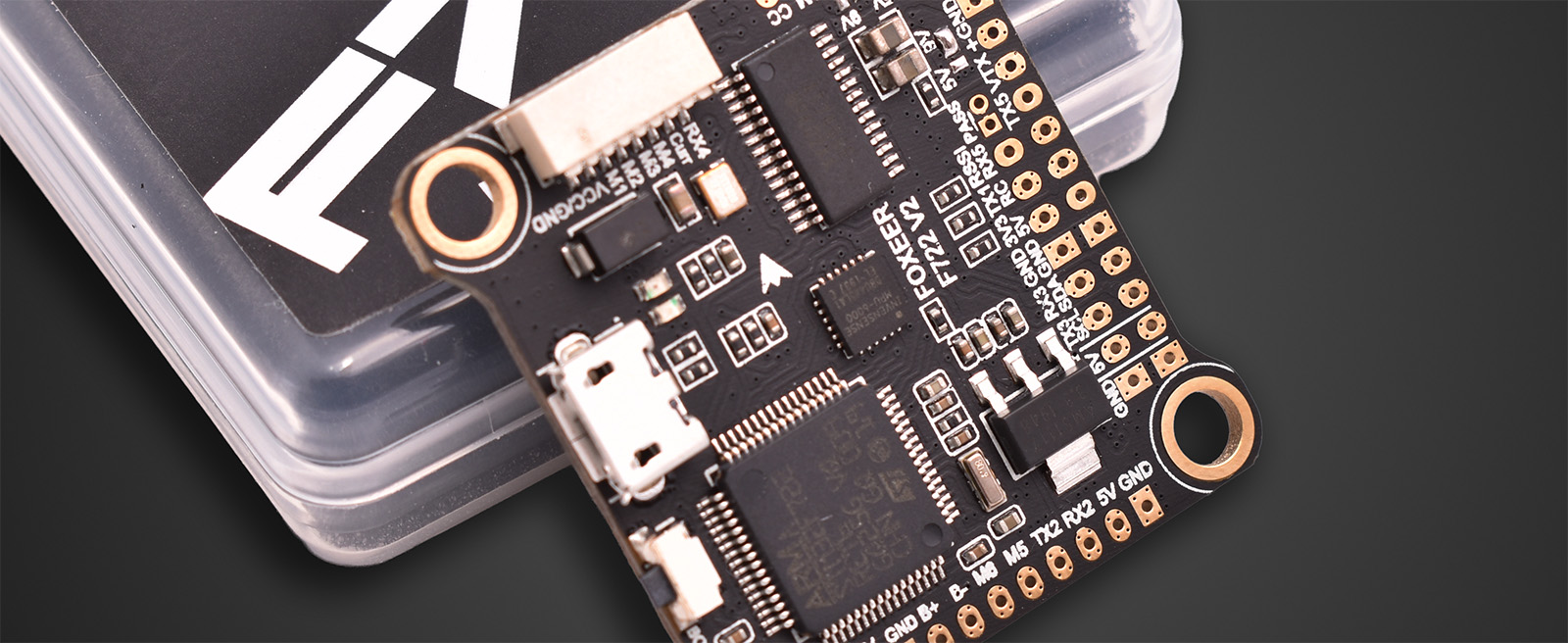
Matek F765-WSE flight controller preview
Who makes the best fixed-wing flight controllers? Most probably Matek. Their series that begun with Matek F405-WING in 2018 is still going strong. Some models are end-of-line and new ones are created. The Matek F765-WSE is the next generation of Matek WING flight controllers that will appear on the market in late Q3, early Q4…
-
INAV 3.0 Final is finally here
Almost exactly six months after the previous major release and four weeks after releasing the first test version, the INAV team is proud to announce that INAV 3.0 is ready! The full list of changes in INAV 3.0 is very long, and it was already covered here and here. Instead of repeating myself again, let…
-
INAV for tracked rovers and tanks
INAV 2.5 introduced rover and boat support. However, INAV setup on tracked vehicles like tanks or with differential steering was never really working like expected. Turning was possible but only in forward or backward movement – throttle had to be not-idle. And that meant that turning in place was not an option. Luckily, the INAV…
-

Bidirectional DSHOT & RPM Filtering – Is It Really Necessary?
There is a group of people who think that the RPM Filter is the best thing to happen to flight controllers and quadcopters since the sliced bread. Perhaps. I’m more inclined to believe that RPM Filter is just an example of good functionality. But it will not be about that, so let’s go back to…
-

How to setup INAV on a rover
INAV finally allowed to use INAV and INAV compatible flight controllers to be used on rovers and boats. Finally, INAV supports not only flying vehicles. Bear in mind, that the rover and boat support is not full, and some functionalities might not be working like expected. What works:
-
All the INAV sensors: are they required or optional?
INAV can use various sensors to fly drones and airplanes: gyroscopes, accelerometer, magnetometers, barometers, GPS, OpFlow, rangefinders, and airspeed. Some of them required some are recommended and some are a purely optional piece of hardware. Here is the full list: INAV Sensors: Gyroscope and accelerometer Required. The flight controller will not boot without a gyroscope…
-
A brief history of a flight controller – From MultiWii to Betaflight and beyond
I will tell you the history of probably the most successful family of Open Source flight controllers: MultiWii that continues its life today as Betaflight, EmuFlight, and INAV. Other families like OpenPilot were not that successful and practically died. On the other hand, the history of ArduPilot is not that interesting and we can leave…
-
INAV on rovers, boats, crawlers, tanks and other ground vehicles
What can INAV do? Well…. it can fly your multirotor drone and a fixed-wing airplane. And it can do it pretty nicely! Unfortunately, that is all it can do. Now, at least. Every year or so, I’m building an RC airboat and always wanted to build a rover based on some kind of an RC…
-
INAV Airspeed Sensor – which one to choose
INAV flight controllers gives you the option to install airspeed sensor on your airplane, just like in Pixhawk and Ardupilot. And just like in case of Pixhawk and Ardupilot, you have several options in terms of the hardware. Airspeed sensors, also known as Pitot tubes, come in two variants: digital and analog.