INAV is an open-source flight control software designed for fixed-wing aircraft, multirotors, and other autonomous vehicles. It focuses on navigation and GPS-assisted flight, making it ideal for long-range drones and planes.
To use INAV on your drone or RC airplane you should take a few steps for a pleasurable experience.
Verify flight controller target
You should always flash your drone with a correct firmware target that depends on the type of flight controller. To check it, for both Betaflight and INAV, go to Configurator CLI tab and type version.
This will give you current version of firmware and target name.
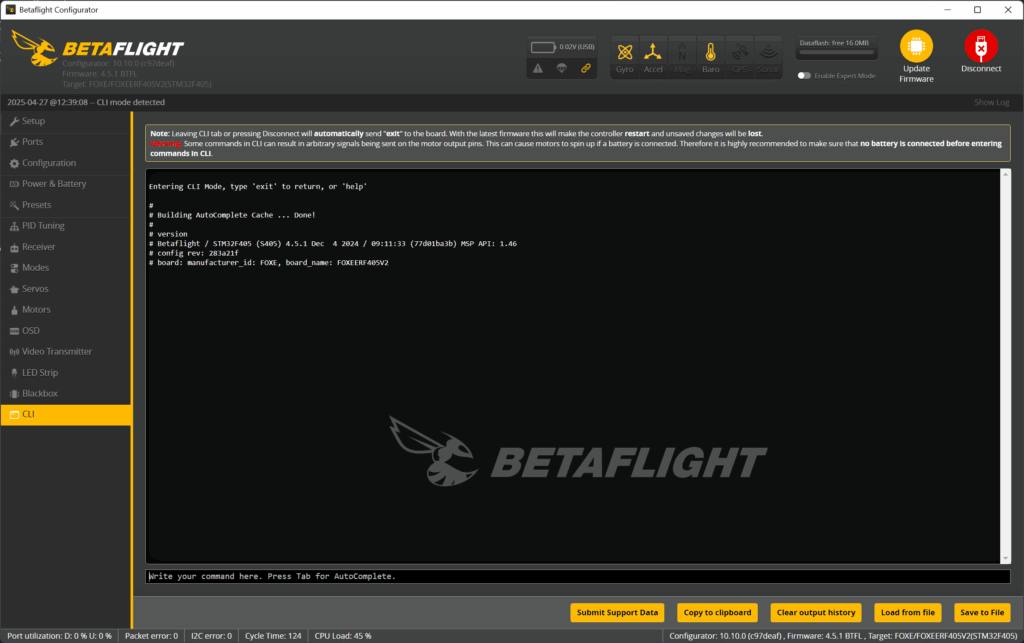
For example
# Betaflight / STM32F405 (S405) 4.5.1 Dec 4 2024 / 09:11:33 (77d01ba3b) MSP API: 1.46
# config rev: 283a21f
# board: manufacturer_id: FOXE, board_name: FOXEERF405Means it’s a STM32F405 based flight controller made by Foxeer and target name is FOXEERF405
Remember this name, it will be handy later
Download INAV Configurator
Go to INAV Configurator GitHub release page and download a version for you operating system. Always use latest release.
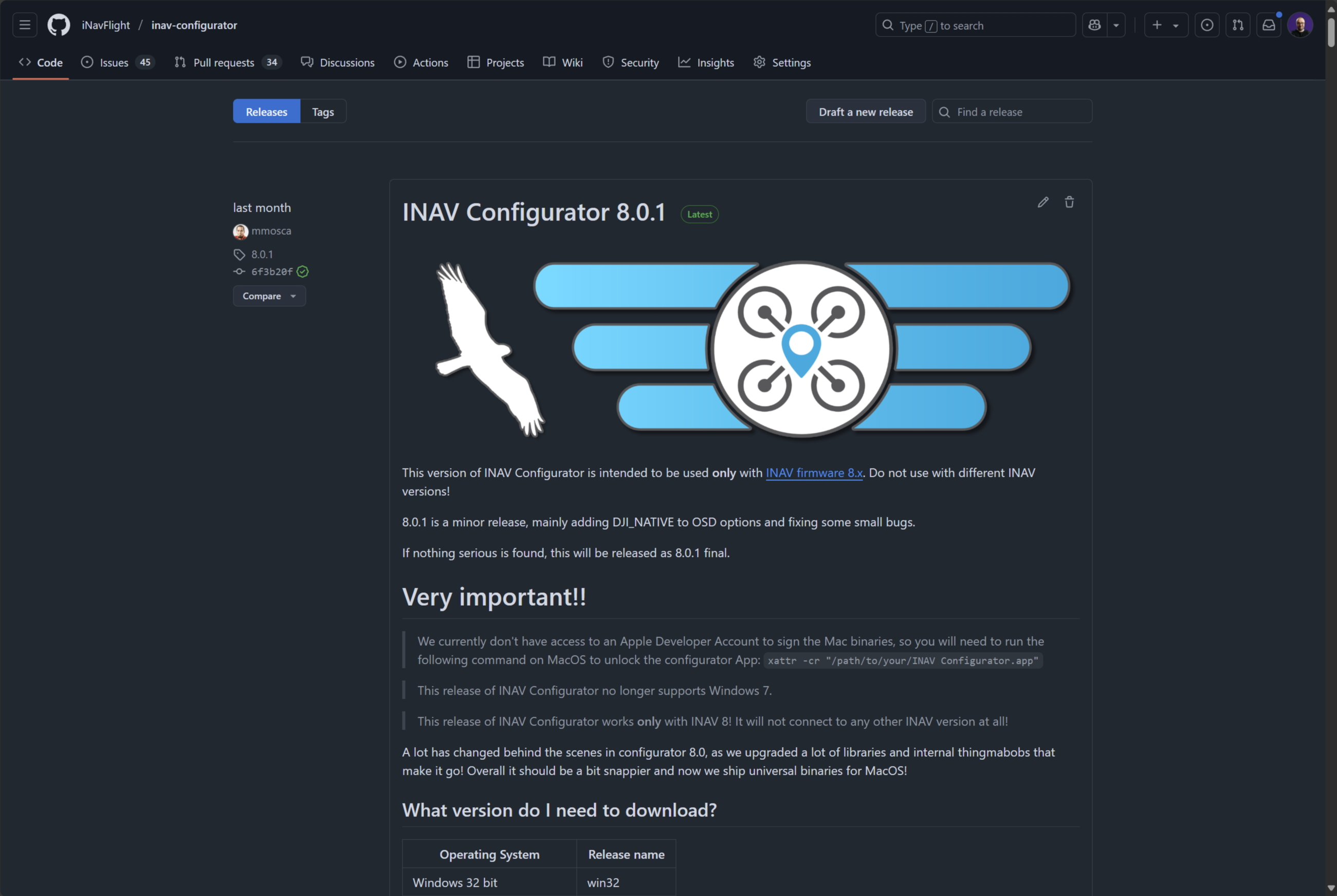
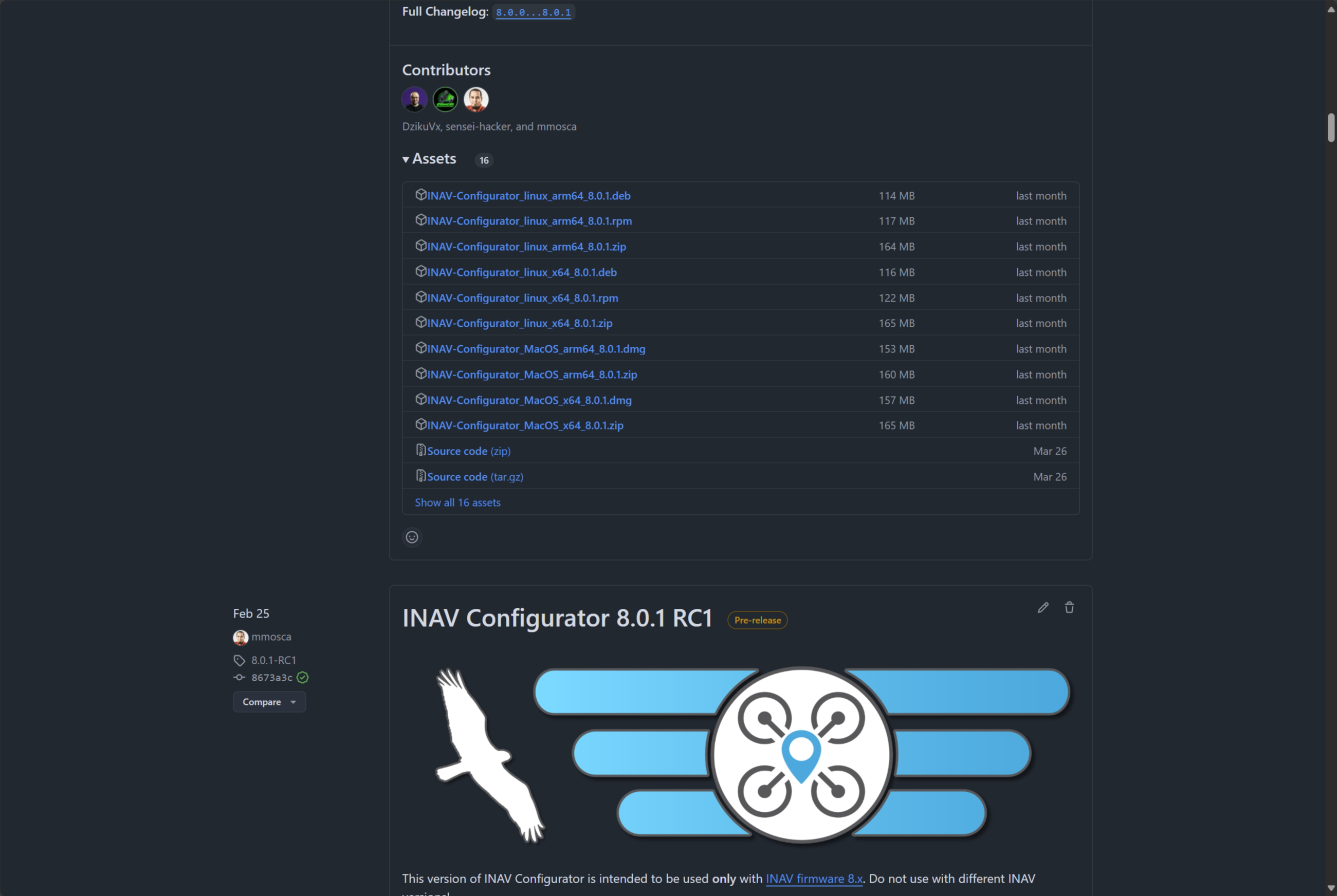
INAV provides binaries for:
- Linux ARM64
- Linux x86_64
- MacOS ARM64
- Windows x86_32
- Windows x86_64
Run & flash
Download, install and run INAV Configurator
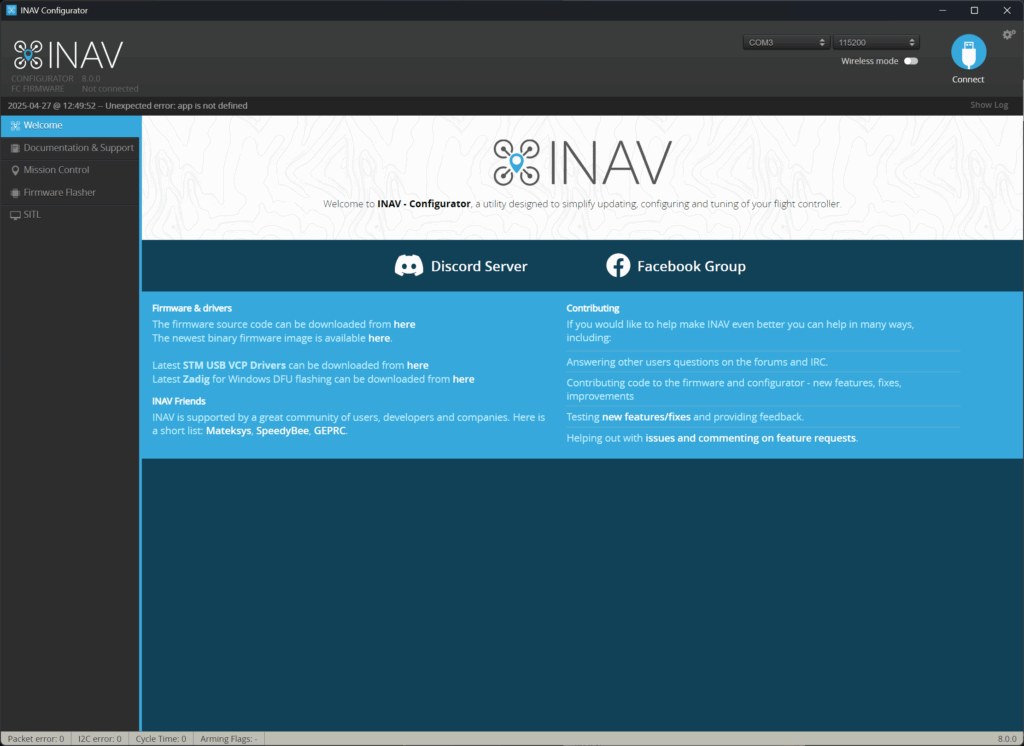
Got o Firmware Flasher tab
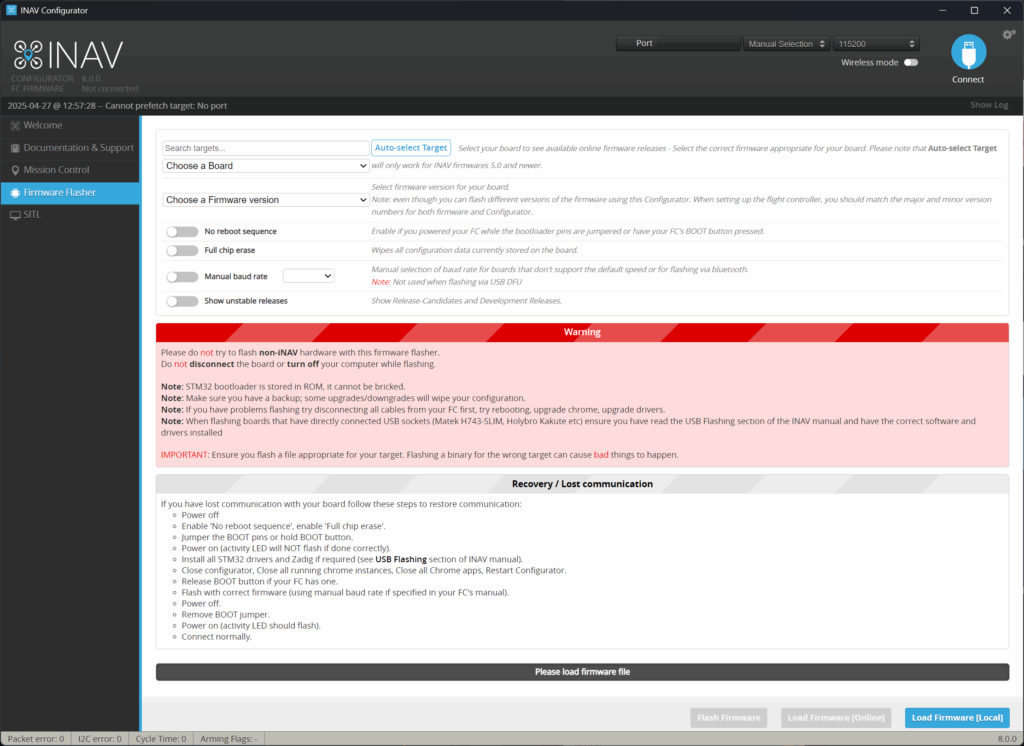
Select target by the name you got in the first step (told you it will become handy), INAV version, select Full chip erase and click button Flash Firmware
If you can’t find the name in the list, this mean INAV is not supporting your hardware. Sorry
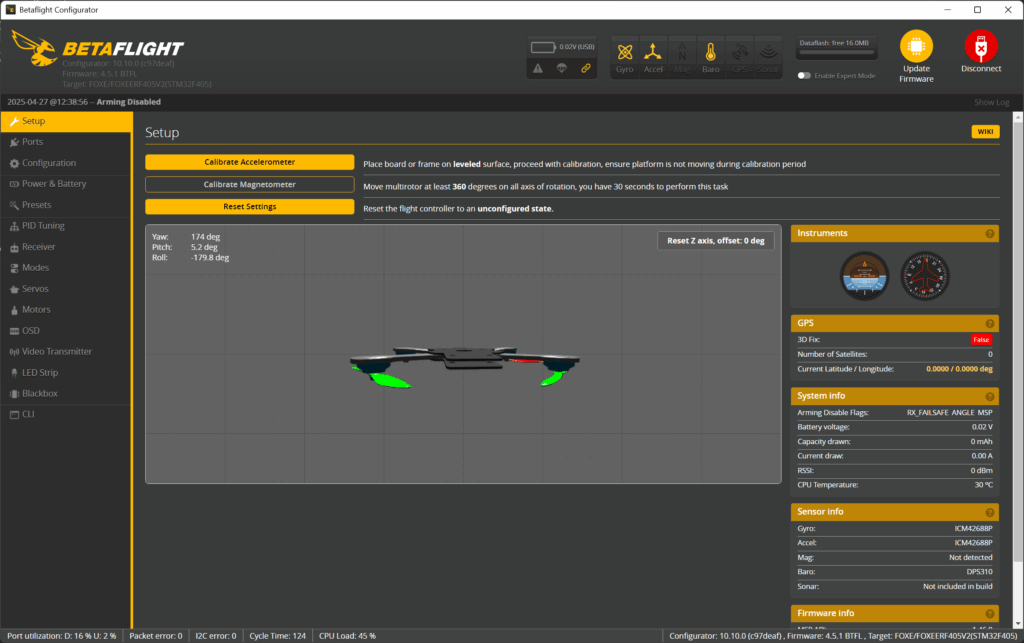
After flashing is done, select serial port and click Connect button (blue in the top right corner).
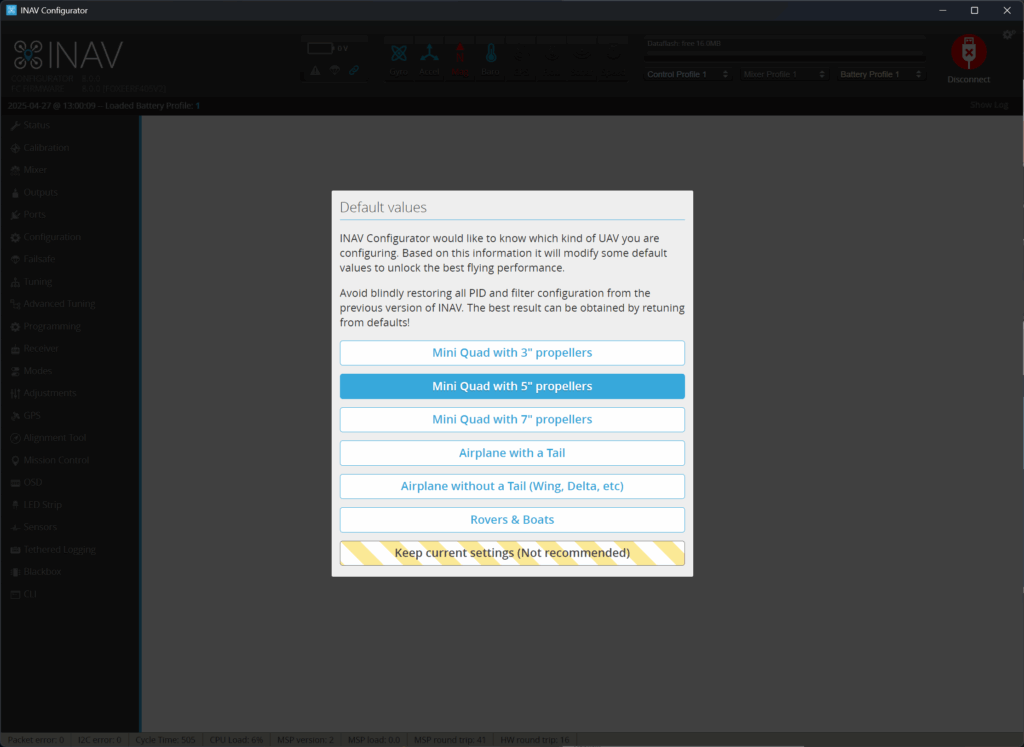
No, the only thing to do is to set everything up the help of Setup Wizard and tutorials you can find in the internet.