
It’s been a while since INAV 8.0 and INAV 8.0.1 were released. And I can easily say, it’s the state-of-the-art release on this flight controller firmware. It has got new features for everyone:
- Improved tuning with Ez-Tune
- Ez-Tune is now the default PID tuning method for multirotor drones
- Full blown DJI O4 support
- Geozones
- Dead reckoning for airplanes
- Mavlink enhancements
- I-Term lock for airplanes
- Setup wizard
- And many more!
Here is the short description of my favorite new features

Setup wizard
INAV will assist you with setting up basic hardware like radio receivers and GPS configuration. Once you flash the new version to your flight controller and reset settings to defaults, wizard will set majority of the settings for you.
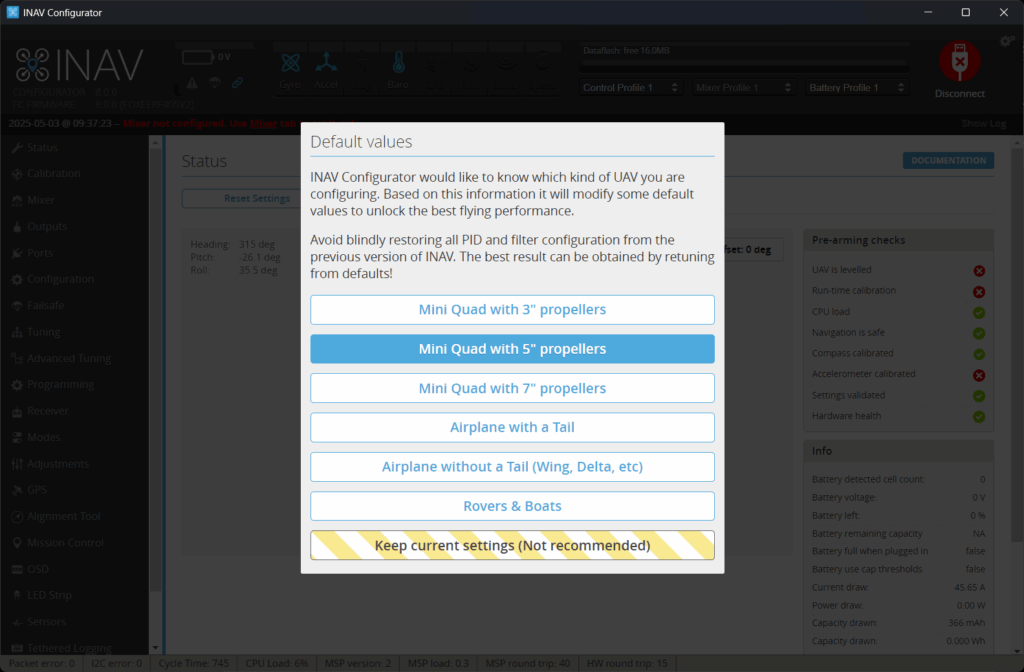
First you will have to decide on the type of machine you intend INAV to use on. You have a few options:
- 3” mini quads
- 5” mini quads
- 7” mini quads
- Airplane with a tail
- Airplane without a tail – flying wing
- Rover or a boat
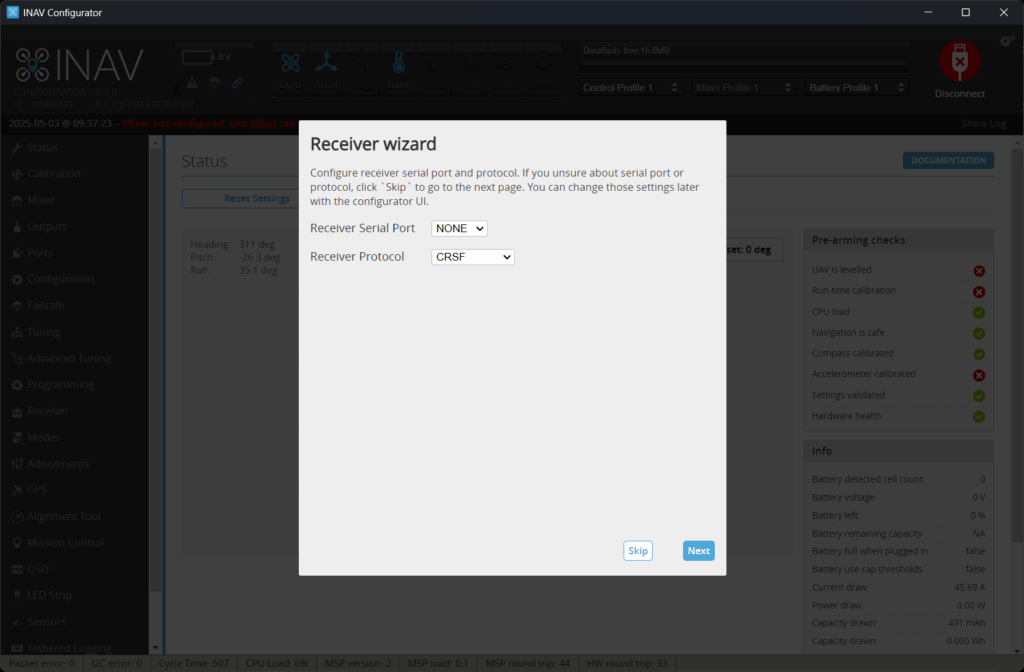
Then, you can enter which type of radio receiver you use (CRSF, SBUS, etc.) and to which serial port it’s connected to.
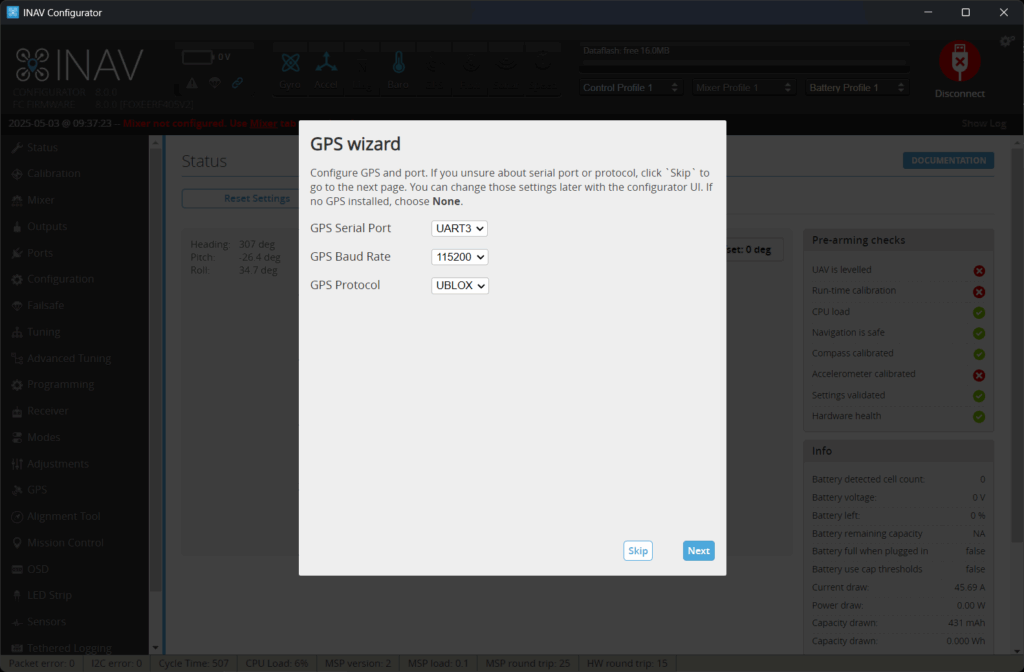
And finally, if you intend to use GPS and to which serial port it’s connected.
Instead of manually doing all those steps manually in separate Configurator tabs, INAV Setup Wizard will set everything for you.
Ez-Tune is default tuning method for multirotors
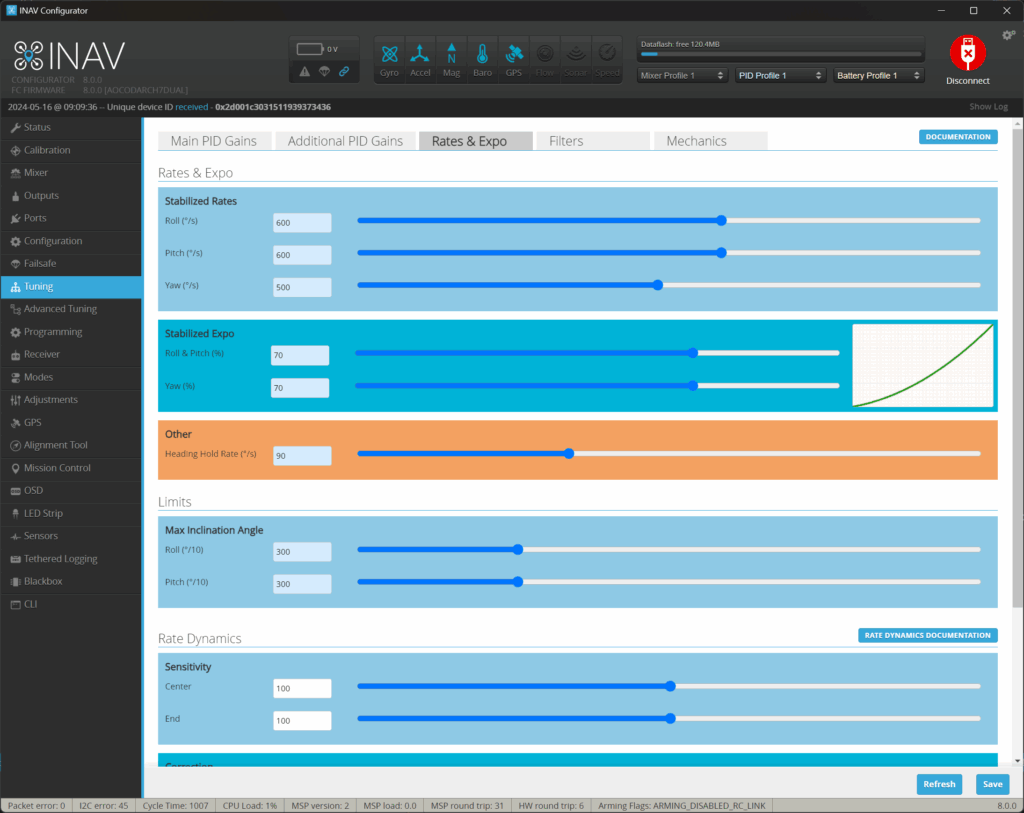
Ez-Tune was available in INAV for a while, but now it’s a default and suggested way of tuning all the multirotor FPV drones. After all, why to set dozens of different settings, when you can do it with only a few? Once Ez-Tune is enabled (and standard presets enable it by default), you will see completely reworked Tuning tab. Everything in one place, nice and convenient to use.
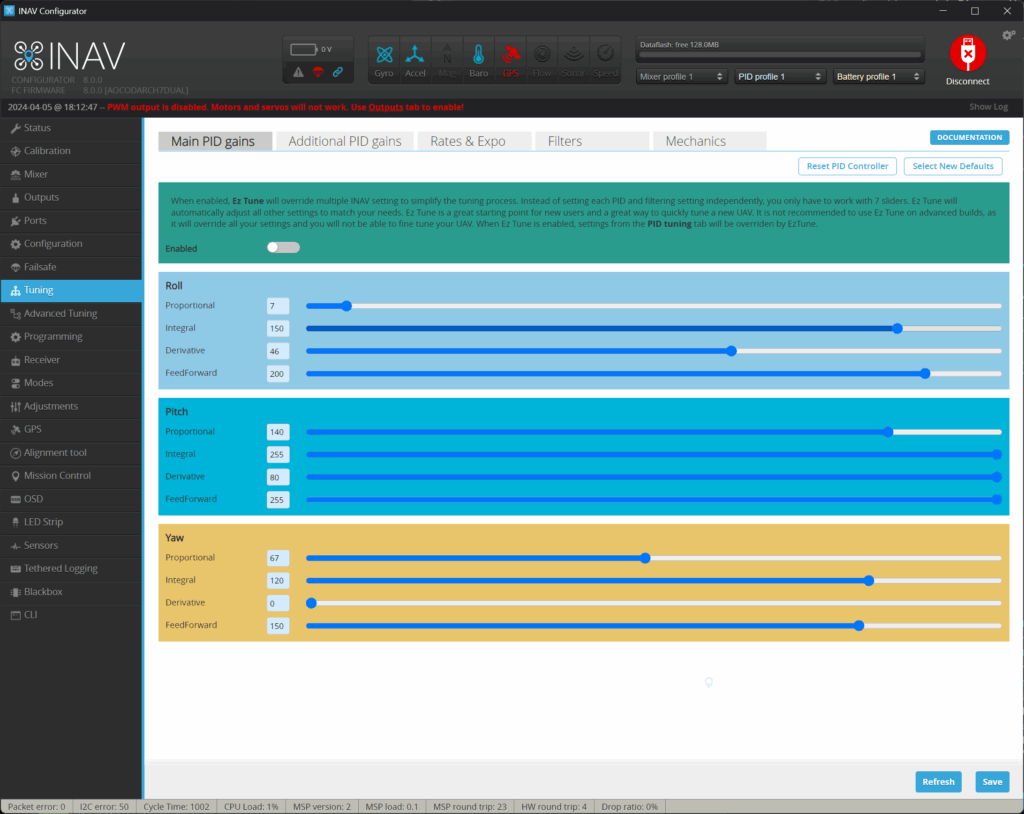
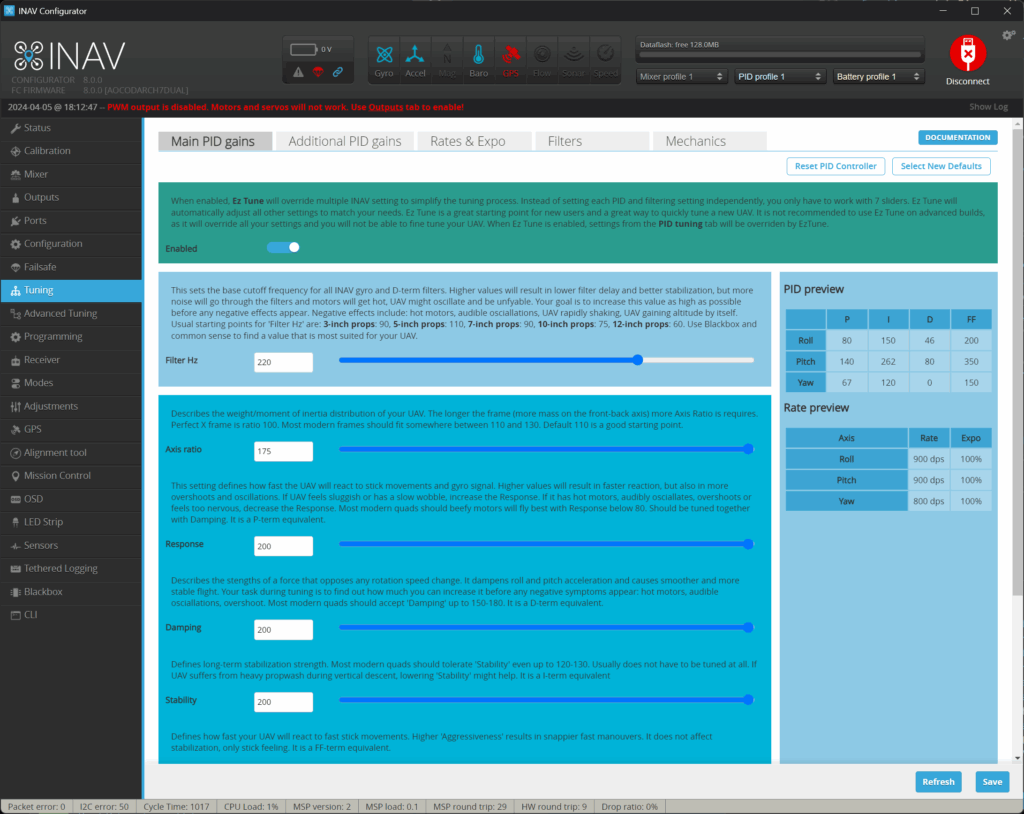
Plus, some extra tweaks on other tabs as well. Tuning was never simpler!
Tutorial on how to tune with Ez-Tune is here:
I-Term Lock
This is something that all the fixed wing pilots were waiting for! Bounce back? With I-Term Lock, bounce back is no more! Functionally, it’s a counterpart of Multirotor I-Term Relax but more suited for Fixed Wings.
I-Term Lock is a hybrid approach to a fixed wing stabilization problem: stabilized + manual depending on current situation.
When the pilot is not moving roll and pitch sticks, INAV attempts to stabilize the airplane with a standard PIDFF controller.
When pilot moves the sticks, the following happens:
- P-Term and D-Term are attenuated with a bell curve: no attenuation at stick-center and full attenuation at approximately 50% of rate target
- I-Term is attenuated in a similar way for as long as error (setpoint – gyro) is low
- When target reached a threshold (20% of max rate) and error is above 10% of max rate, I-Term is completely attenuated until error is low again.
- FF-term is never attenuated
As a result, UAV feels fully stabilized near stick center and like in Manual mode when executing fast maneuvers.
All the other
Of course, this is just the tip of the iceberg. To get the list of all the relevant changes, go to INAV and INAV Configurator release page. Release notes cover everything and provide links to detailed explanations.
You can download INAV 8 from GitHub.
If you don’t know how to do it, here is a tutorial on exactly this topic.





