Category: RC & FPV
-
How to connect APM Airspeed Sensor (Pitot Tube) to INAV
Recently released INAV 1.7.2 introduced new hardware support: analog airspeed sensors. I’ve written new but it is new only to INAV. Analog airspeed sensors aka APM Pitot Tubes aka Ardupilot Airspeed Meter and one the market for years. And they are cheap. By cheap, I mean below $30. And until recently they were usable only…
-
GPS Racer: worklog #9 – double rangefinder setup
My GPS Racer is less and less fun project. For last few weeks it acts as sensor platform for my attempts to bring rangefinders and terrain following modes back to INAV. This time in a way that will work. Two weeks ago it was carrying HC-SR04 sonar (crappy device). Week ago it was carrying US-100…
-
How to read PPM signal with Arduino?
More than a year a published a post called Generate PPM signal with Arduino. Today it’s time for part two: How to read PPM signal with Arduino?. Strange thing: internet does not gives very useful information on this topic. Strange, right? Some links to pages that does it either very very wrong or in not…
-
GPS Racer: worklog #8 – sonar test platform
I honestly admit, that my 6″ quad (codename GPS Racer) was never very pretty. It was just ugly with that GPS tower on the front. Today it got even uglier: I’ve equipped it with HC-SR04 sonar connected via I2C bus (ATtiny85 to the rescue). Why, you might ask, have I done something so useless? Answer…
-
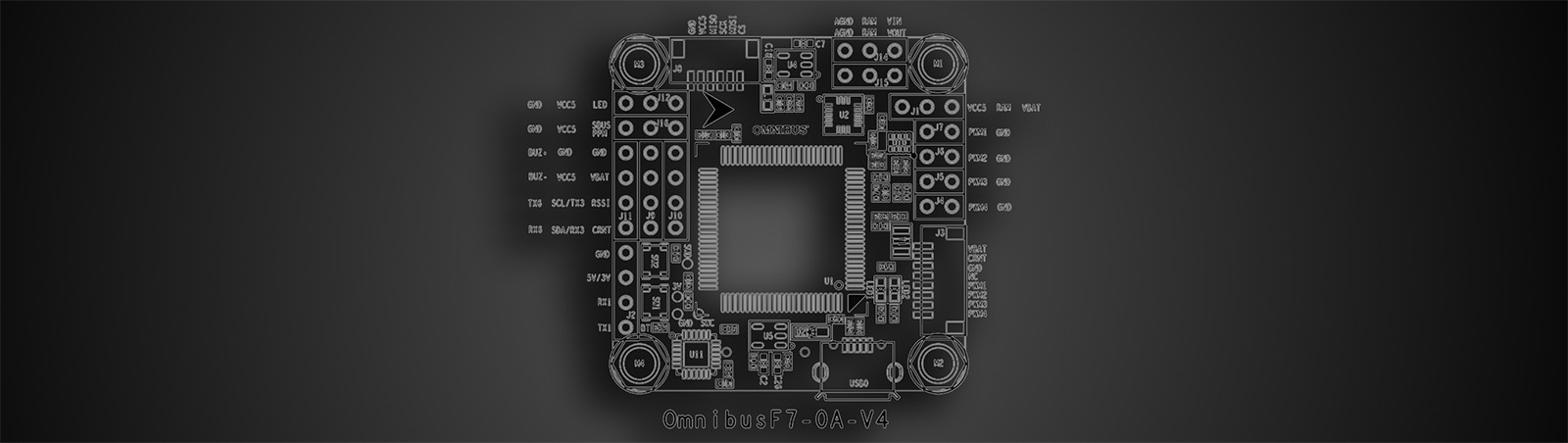
Omnibus F7 Flight Controller
I got my hands on a new STM32 F7 flight controller: Omnibus F7. Before we proceed, small note. I am a huge fan of F7 flight controllers. In a year, they will be a main line of high performance FC on the market. STM32F7 with built-in UART inverters solves so many issues STM32 F4 boards…
-
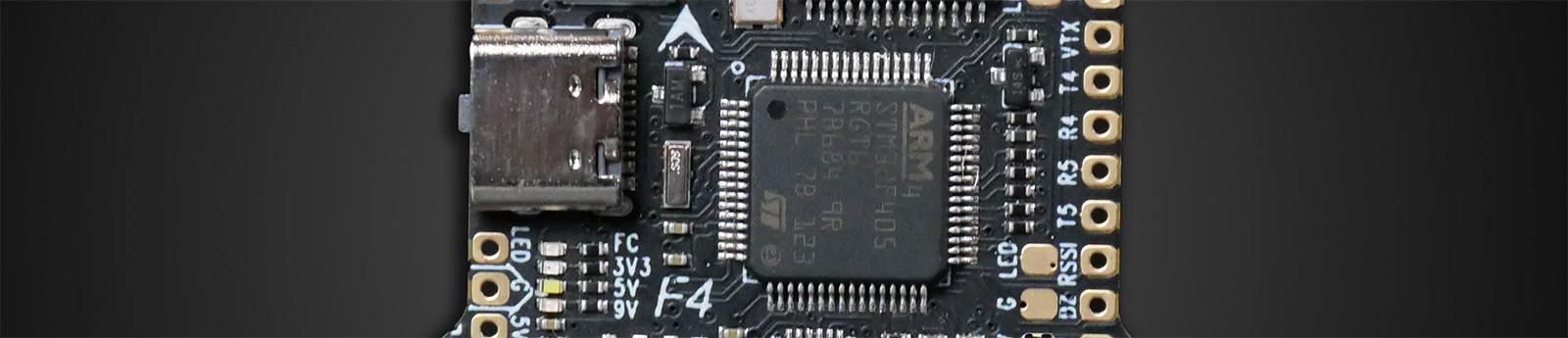
Hardware revisions of Omnibus F4 flight controllers
The Omnibus F4 series is one of my favorite flight controllers. Two of my quads are flying thanks to them. They might not be the best or the famous ones, but they get the job done. And that is what counts. Unfortunately, they are not free of faults (and what is?) and each next revision…
-
GPS Racer: worklog #7 – flying at night
Like promised, I took GPS Racer equipped with night vision camera RunCam Night Eagle and IR projectors for a night flight. And it worked. Not as good as I expected, but worked. RunCam Night Eagle is sensitive enough to fly at night. Just like that. As long as there is at least some light, you…
-
GPS Racer: worklog #6
I have to admit, I have a talent for building ugly looking quadcopters and airplanes. But this is a step forward. This is the ugliest quadcopter I’ve ever seen… just look at it… So ugly, that almost beautiful… Those two “eyes” are IR projectors and that almost not visible FPV camera is RunCam Night Eagle……
-
GPS Racer: worklog #5
I’ve finally decided to make a decent use of my GPS Racer quadcopter. Until now, I mainly used it to test new things for INAV and that is more less all. RunCam Owl Plus FPV camera turned out to be non-flyable in the night, so I’ve decided to go one step further… RunCam Night Eagle…