-
Preview: cheap APM Power Module for Cleanflight
Recently I’ve got my hands on a pair of cheap APM Power Modules from eBay with integrated 5V BEC and current meter (90A max). Although they are APM designed and will not work stright away with STM32 flight controllers like Naze/CC3D/SPRacingF3 (or rather would work only once since they are 5V scaled and those flight…
-
How to measure gyro noise frequency with Blackbox
Betaflight (and INAV) lowpass filter tuning can be a hard thing to do if you have not idea what is noise frequency you want to cancel. Sure, you can blind test or read tutorials. But what if I tell you, you can measure it quite precisely using only Blackbox logs? Or measure rotation speed of…
-
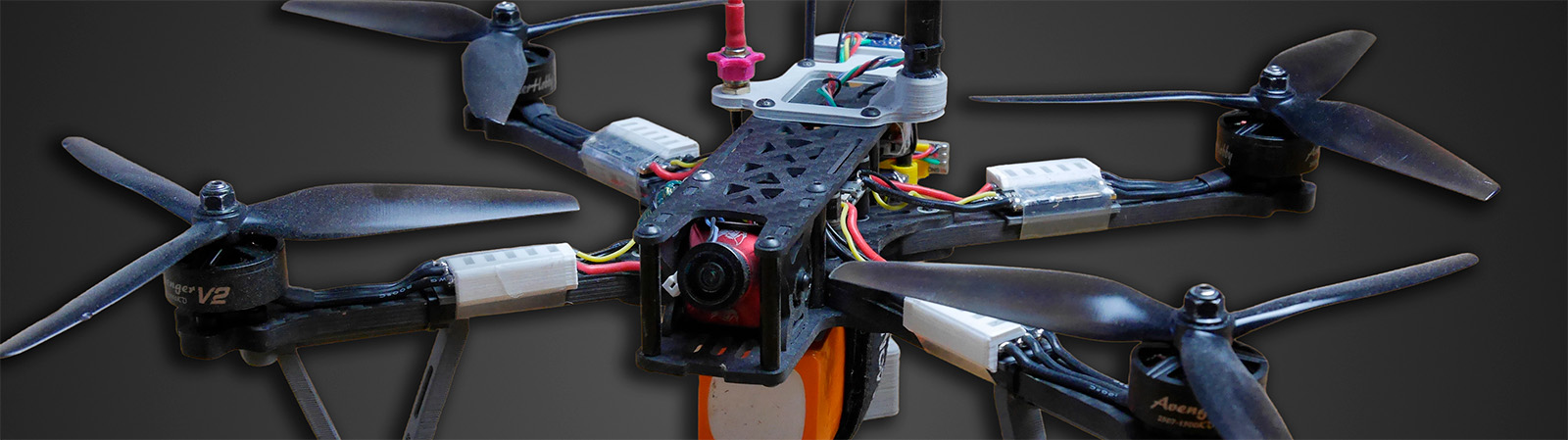
Air Crash Investigation: gone in 6 seconds
“What goes up, must come down”. I had an opportunity to face this old truth 2 weeks ago, when my 600mm quadcopter felt from 30 meters straight into water. It was supposed to be a simple flight: take off fly few hundred meters away with GPS assist engage Return To Home and land Dozens of…
-
PWM, OneShot125, OneShot42, Multishot and DSHOT comparison
Two years ago it was simple: you wanted to connect ESC to a Flight Controller or radio receiver, you were just doing it. There were only one (maybe 2) protocols that allowed to pass information to ESC. It was a standard PWM protocol. And it was enough. No, with faster hardware, mini or even micro…
-
BLHeli firmware for ZTW Spider 40A OPTO Small ESC
ZTW Spider 40A OPTO Small ESC with stock SimonK firmware can be easily flashed with BLHeli using Cleanflight interface. I just did it, the whole process took few minutes. To be true, it took me more time to find out which firmware should those ESC be flashed with, than to flash them. For unknown reason…
-
How to dispose / utilize LiPo batteries
LiPo batteries that run RC hobby are potentially dangerous devices. When not handled properly they can ignite or even explode. And they do not live forever. Even the best battery, no matter how taken care off, loses capacity, swells and has to be disposed. When we combine both facts we face a problem: how to…
-
INAV 1.1 for Naze32 with working telemetry
As long as Naze32 / Flip32 are decent flight controllers for those who does not demand too much, they share very big flaw: low flash memory size. While even a year ago 128kB of flash was enough, times changed, and limited flash makes a problem for advanced flight controller software like INAV. Starting from INAV…
-
Hands on: Reptile X4R 220 quadcopter frame
Last week, first parts for my new racing quadcopter started to arrive. One of them, was carbon fiber frame: Reptile X4R 220. Why this one? Like I stated many times: I’m cheap. Plus, I did not wanted to go with another ZMR250 build. This frame was easily available, within budget and good looking. So, few…
-
Hands on: Matek PDB-XT60
As long as quality is decent, there is nothing better like "el cheapo" electronic components. Just like below $5 Matek PDB-XT60 Power Distribution Board with integrated 5V and 12V BEC. Preparing to build a new 220 racer I just got my Matek PDB from Aliexpress. Quality, at a first glance looks good. Laminate nicely cut,…