-
Omnibus F4 Pinout
Omnibus F4 is a new family of All-In-One (AIO) STM32F4 based flight controllers with integrated OSD (On-Screen-Display) for FPV purposes. Basically, it is Airbot F4 / Flip32 F4 with added MAX7456 and some minor tweaks.
-
MPU6000 vs MPU6050 vs MPU6500
MPU6000 and MPU6050 Deep down, MPU6000 and MPU6050 are the same same hardware. They both have the same 3 axis gyroscope and the same 3 axis accelerometer. Both allows max 8kHz gyro sampling rate. From a flight controllers point of view, the only difference between them is bus that connects them to CPU. MPU6000 allows…
-
UART1 and PPM on Airbot F4 / Flip32 F4 Flight Controllers
Today I’ve discovered another small but irritation limitation of Airbot F4 / Flip32 F4 also known as CC3D REVO for unknown reason. Looks like, by default, this board is unable to share UART1 RX line and PPM input. So, if you would like to connect, for example, OSD or GPS to UART1, you would have…
-
Singles’ Day Deals for DJI Phantom
In some countries 11.11 is an Independence Day. In some countries it's a shopping festival. If anyone want's to cut a good deal, this is one of the best times to do it. For example on GearBest which prepared very nice promotions for DJI Phantom series. DJI Phantom 3 Advanced for $580,99 (original price $799)…
-
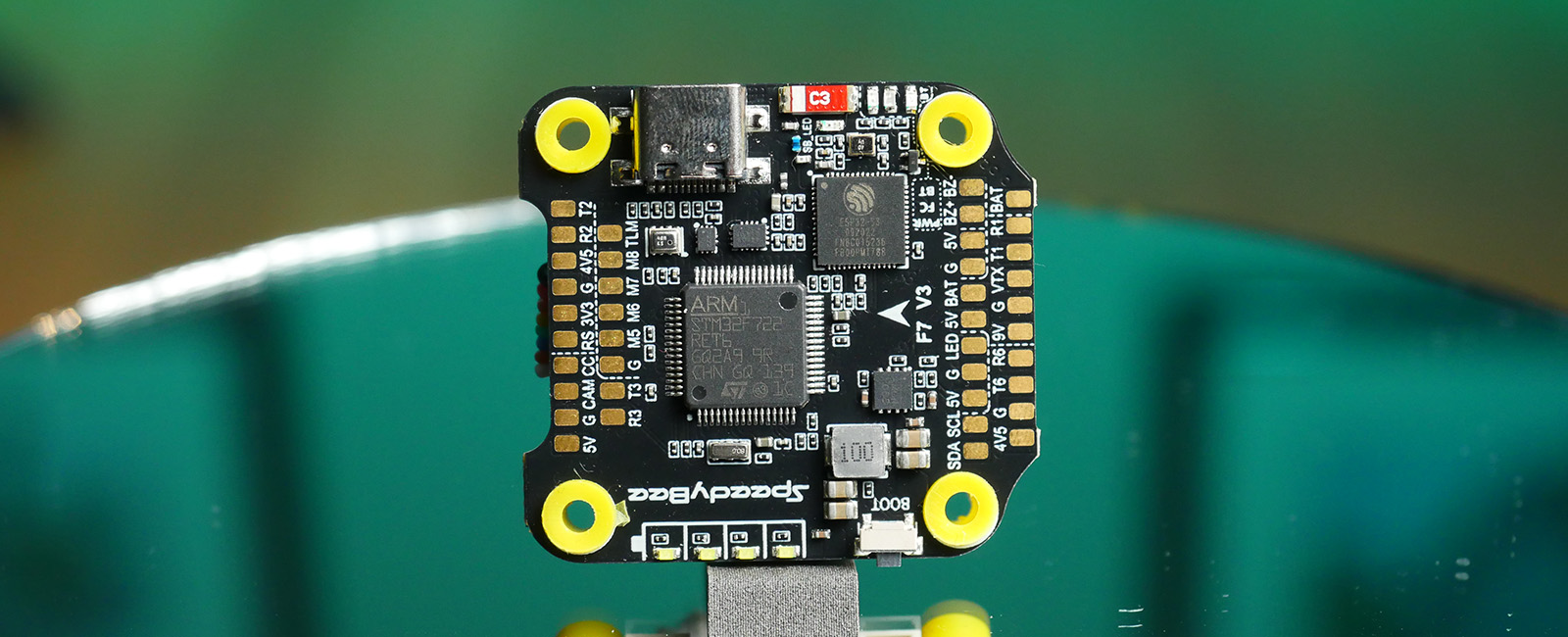
How much power flight controller consumes?
Year after year flight controllers grow stronger, faster, more powerful. Three years ago we had MultiWii running Arduino. Two years ago it was Naze32 with STM32F1. Year ago it was SPRacingF3 with SMT32F3. This year it is something with STM32F4. Is there a price is power consumption to pay? Should we start using stronger BECs?…
-
INAV 1.3 has been released
I'm happy to announce new version of INAV ready do download from official repository. What is new in INAV 1.3? Quite a few thinks. No "revolutions", more like steady progress. From most important things: INAV now supports PWM, OneShot124, OneShot42 and Multishot ESC protocols and asynchronous motors and servos updates Something for airplanes with a…
-
Flip32 F4: what is where
-
PWM, OneShot125 and Brushed motor protocol on an oscilloscope
When I’ve buoght an oscilloscope (cheap digital DSO201), I’ve decided it would be a good idea to see how different ESC protocols looks like from the signal point of view. Previously I’ve written few words about them, like which is the fastest as so on, but is there something “special” about them? Well, let’s find…
-
Project Dualcopter – worklog #2
3 weeks after my first post on Project Dualcopter, it's time for small update. The plan was to install servos and control surfaces. Instead, I've done: Basic electrical wiring for motors and ESCs. They have power now and are ready to be connected to flight controller To level shelf (above propellers) designed to hold flight…