-
Detecting Cleanflight PID tuning issues with Blackbox: not enough P
This is third part of Cleanflight PID tuning tutorial with Blackbox. Previously I’ve showed examples of: Excess P gain, Excess D gain, This time it is time for something slightly different: not enough P gain. Usually this problem can be identified without any log analysis. Symptoms are quite visible: multirotor is sluggish during maneuvers, has…
-
Detecting Cleanflight PID tuning issues with Blackbox: excess D gain
Welcome to second part of Blackbox PID tuning tutorial. Last time I have showed few examples how excess P gain might look like. Today I will write few words about next common PID tuning problem: too much D. Derivative (future) part of PID controller is very useful, since it allows to smoothen control loop output…
-
Using transistors as switches
I think all popular computerized DIY devices like Arduino, Raspberry Pi or any other microprocessor/microcontroller based boards has one common drawback: low output current. Few miliamps per pin. While this is enough to light a single LED or provide input to other electronics device, it is far from enough to run a motor or power…
-
Problem: no OSD when camera is connected on minimOSD MW OSD
Problem When camera and minimOSD are connected to video transmitter, minimOSD is not overlaying OSD data. If camera is disconnected, OSD data is transmitted. After connecting camera, only camera image is transmitted. Possible Solution Check if camera and minimOSD are using the same display system. Usually monitor/goggles and video transmitter does not care very much…
-
DIY FPV LC power noise filter
Both electrical motor and ESC are source of electrical noise that influences all devices connected to the same battery. This is why, very often, on airplanes or big multirotors FPV circuit is powered from separate battery. On small or medium drones this can be hard to archive: additional weight will influence both flight performance and flight time.…
-
Quick review: Turnigy 2730 1500KV brushless motor
I’ve bought first Turnigy 2730 1500KV brushless motor by accident. I needed something small and cheap for Depron airboat. Then I needed something similar for a Depron airplane. At the end, in 6 months, I owned 3 T2730 1500KV motors. Not all of them survived the experience. One got lost in the middle of a lake…
-
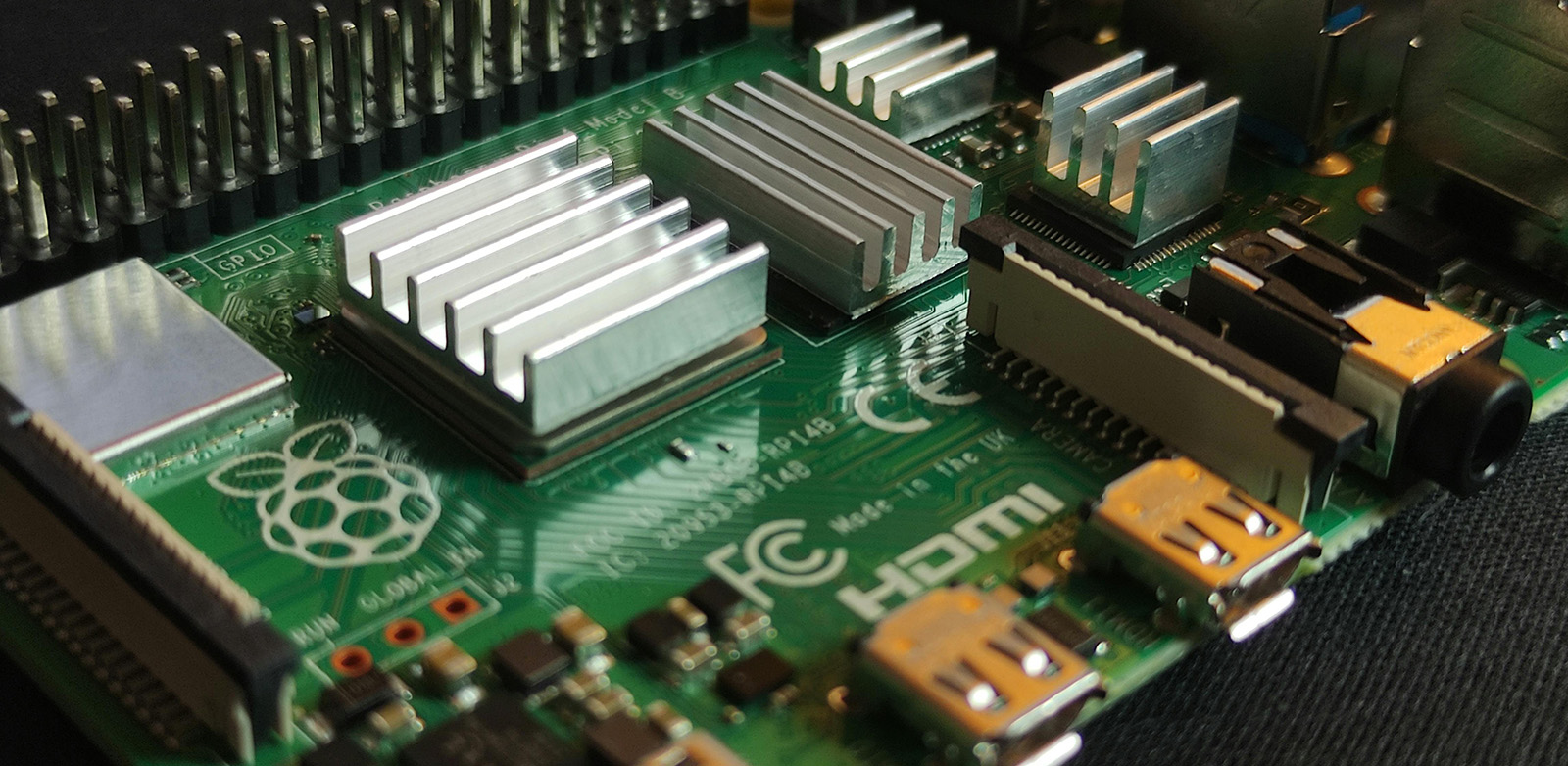
Raspberry Pi: reset external I2C devices (not only I2C)
Electronic, and specially computerized, devices likes to hang from time to time. There are many reasons: software bug, hardware error, voltage drop, interference, too long wire, random incident. I’ve learned this hard way during work on my Raspberry Pi based weather station. From time to time external DTH22 temperature/humidity sensor refused to work. Only solution…
-
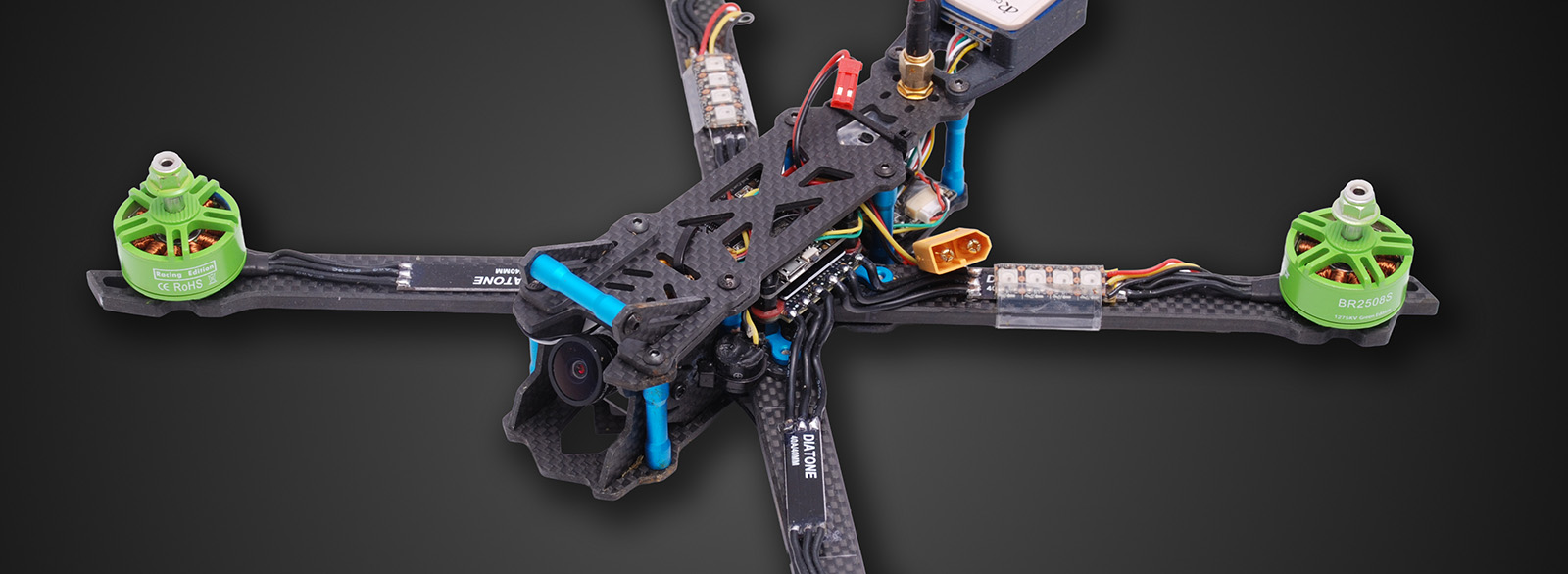
Detecting Betaflight PID tuning issues with Blackbox: excess P gain
Almost all quadcopter PID tuning tutorials can be summarized into one sentence: “Increase P until you see oscillations, then lower it”. Plus some thoughts about I and very vague advices about D and that is all. When I got into the hobby, I’ve read all of those tutorials. And I did know more about PID…
-
PPM output on FrSky X4R and X4R-SB receivers
FrSky sells 2 small Taranis compatible receivers: X4R and X4RSB. By default, they offer only PWM signal. 4 channels on X4R and 3 channels plus S.Bus (16 channels over S.Bus) on X4RSB. And that is problematic. Many flight controllers does not support S.Bus very well (no inverters) or just does not offer enough UART ports.…