-
RunCam Split very late pseudo review: it’s not good
I own RunCam Split. I own it for like 2 months now, and it’s still in a box. Never connected, never really used. And in the meantime, I’ve build 2 mini quads are rebuild third. Why is that? Is there something wrong withthis camera that I’m not using it anywhere? And not planning to? Let’s…
-
Testing 868MHz LoRa range, part 3: round trip
After determining that range of 868MHz LoRa wireless modules E45-TTL-100 have, at least, quite impressive range (5,7km and I was out of line-of-sight to test further) I’ve decided to test something else. In the beginning I was planning to use those radio modules for telemetry only, but then another thought crossed my mind: why not…
-
Quick note on SEMTECH SX1276 100mW output mode
Few facts about SEMTECH SX1276 LoRa modem and 20dBm (100mW) mode: +20dBm (100mW) is possible only on PA_BOOST pin Pins RFO_LF and RFO_HF allows only up to +17dBm (50mW) Maximum allowed duty cycle while using +20dBm mode is 1% Maximum allowed VSWR while using +20dBm mode is 3:1 The biggest problem with +20dBm on PA_BOOST…
-
Hands on: Tiny Frsky 8CH Receiver from Banggood
I have a nasty habit of buying things and then forgetting about them. Something like that happened to Tiny Frsky 8CH Receiver (Wolfbox F802 software compatible) from Banggood I’ve purchased last year. For some time I used it in JJPro P175 quadcopter, but then it landed in a box and I forgot about until last…
-
Testing 868MHz LoRa range, part 2: open space
It was a good weekend. At least for me and CDEbyte E45-TTL-100 868MHz LoRa serial wireless modules based on SX1276. Why? Since weather was nice and looks like those modules are way better than datasheet specifies. Specs states: 3km in open space. And I’ve proven almost twice that much range! Last Friday I’ve placed one…
-

Betaflight Dynamic Filtering Explained
Betaflight works as great as it does thanks to amazing gyro noise filtering. Without it, flight would be shaky as hell. The core element of gyro noise filtering are Dynamic Filters. In this article let’s talk about how they work The problem of noise Gyro has a nasty tendency to pick up a lot of…
-
Testing 868MHz LoRa range, part 1: urban area
With a (more less) free evening I decided to finally start testing range of 868MHz LoRa E45-TTL-100 radio modules I described only yesterday. Instead of building new testing rig, I only upgraded testing setup I used to test range of FS1000A and XY-MK-5V 433MHz radio modules. Few hours later I came up with this: I’ve…
-
Understanding Dterm: how Dterm really works
I will be very honest: until very recently I did not really understood how PID controller’s Dterm really works. Yes, something with dampening, something with “looking into future”, bla bla bla. But the reason for not understanding was because I was overthinking it. There is no “magic” only simple mathematics and few basic concepts which…
-
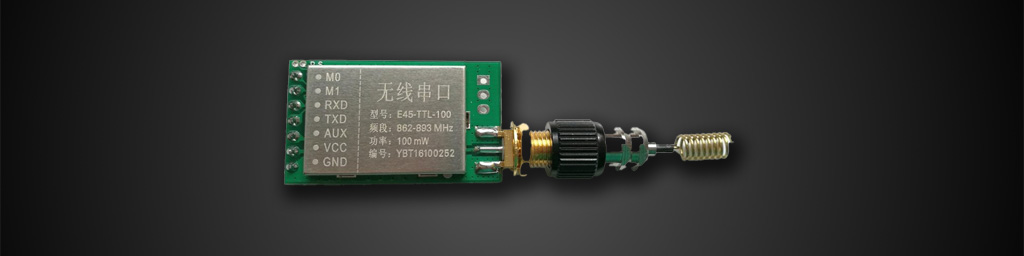
E45-TTL-100 868MHz LoRa wireless modules
My quest for ultimate (?) DIY telemetry system for UAVs continues. Last year I was playing with HC-12 433MHz wireless modules with pretty decent results. After all, more than 1km of range for a few bucks is more than acceptable. Still, HC-12 has at least few problems: