Tag: Betaflight
-
Betaflight and INAV compatible MSP library for Arduino
I’ve been tinkering with RC and FPV gear for years, and every now and then I hit a problem that really shouldn’t be a problem. This time it was MSP. More precisely: connecting small Arduino‑based projects to INAV and Betaflight in a clean and predictable way. On paper it looks simple. MSP is open, documented,…
-
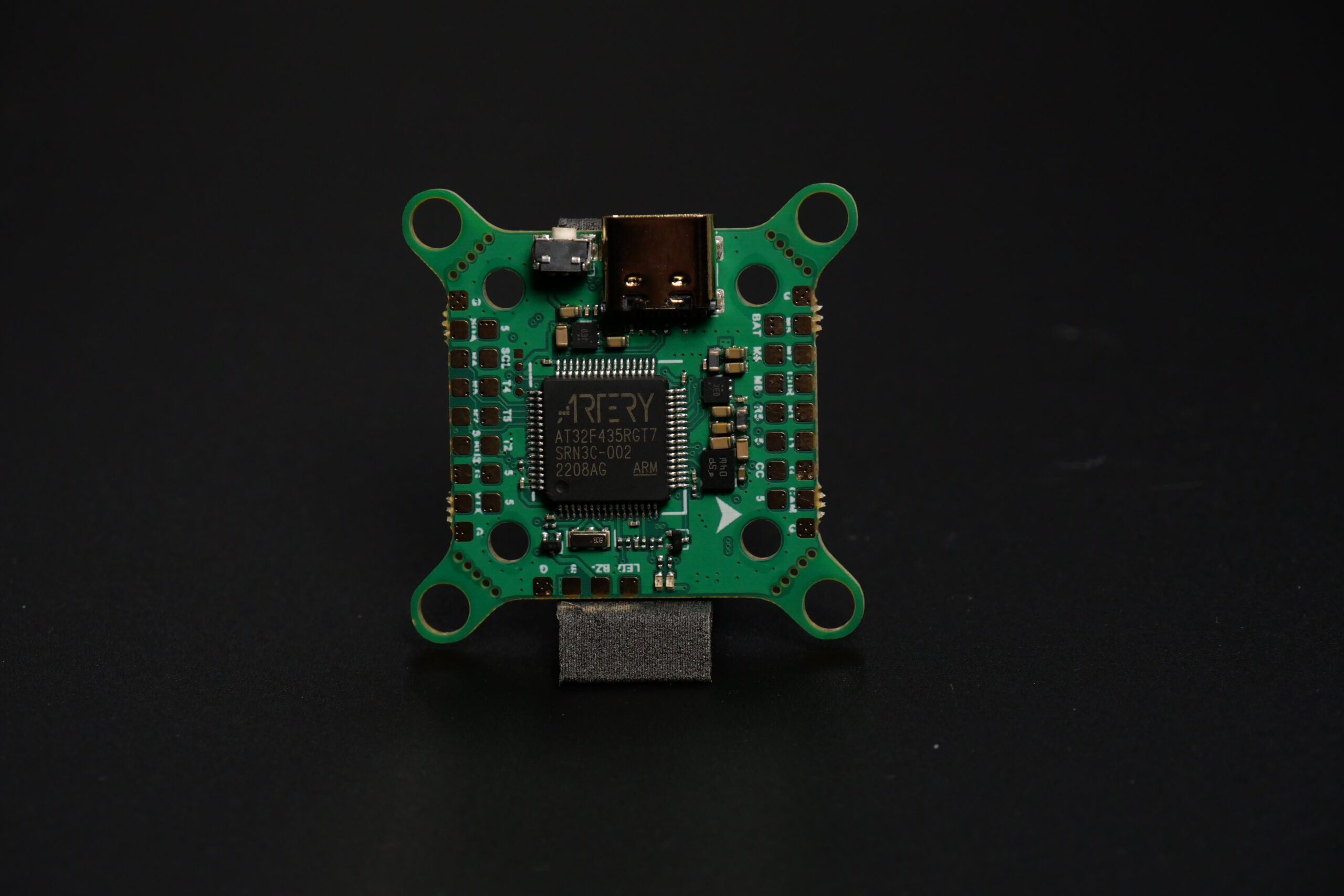
ArteryTek AT32 Flight Controller – NeutronRC F435
OK, I’m kind of hyped with this! What you see on the image looks like an any other flight controller, right? Looks again! It’s not STM32 but ArteryTek AT32! And F435 as a bonus 😉 With the continuing chip shortage supply of STM32 is limited and prices high. Maybe have an alternative source of MCUs…
-

Bidirectional DSHOT & RPM Filtering – Is It Really Necessary?
There is a group of people who think that the RPM Filter is the best thing to happen to flight controllers and quadcopters since the sliced bread. Perhaps. I’m more inclined to believe that RPM Filter is just an example of good functionality. But it will not be about that, so let’s go back to…
-
Radiomaster TX16S Teardown – let’s see what’s inside!
Radiomaster TX16S is one of the most exciting premieres of the first half of 2020. Not only it establishes itself as a second most wanted radio transmitter on the market (right behind radios made by FrSky), it brings a few very interesting features to the table as well. Some of them are: Today, let’s open…
-
Betaflight 4.2 Gyro, Looptime and Gyro Stage 2 Lowpass Filter
Betaflight 4.2 brings some very important changes to how various tasks are processed. Especially how gyro,m filtering and PID loop are working together. First of all, the gyro is sampled always at the gyro native speed. This means, MPU6000 will be sampled at 8kHz. Always. At the same time, PID and filtering are working as…
-
A brief history of a flight controller – From MultiWii to Betaflight and beyond
I will tell you the history of probably the most successful family of Open Source flight controllers: MultiWii that continues its life today as Betaflight, EmuFlight, and INAV. Other families like OpenPilot were not that successful and practically died. On the other hand, the history of ArduPilot is not that interesting and we can leave…
-

Betaflight Dynamic Filtering Explained
Betaflight works as great as it does thanks to amazing gyro noise filtering. Without it, flight would be shaky as hell. The core element of gyro noise filtering are Dynamic Filters. In this article let’s talk about how they work The problem of noise Gyro has a nasty tendency to pick up a lot of…
-
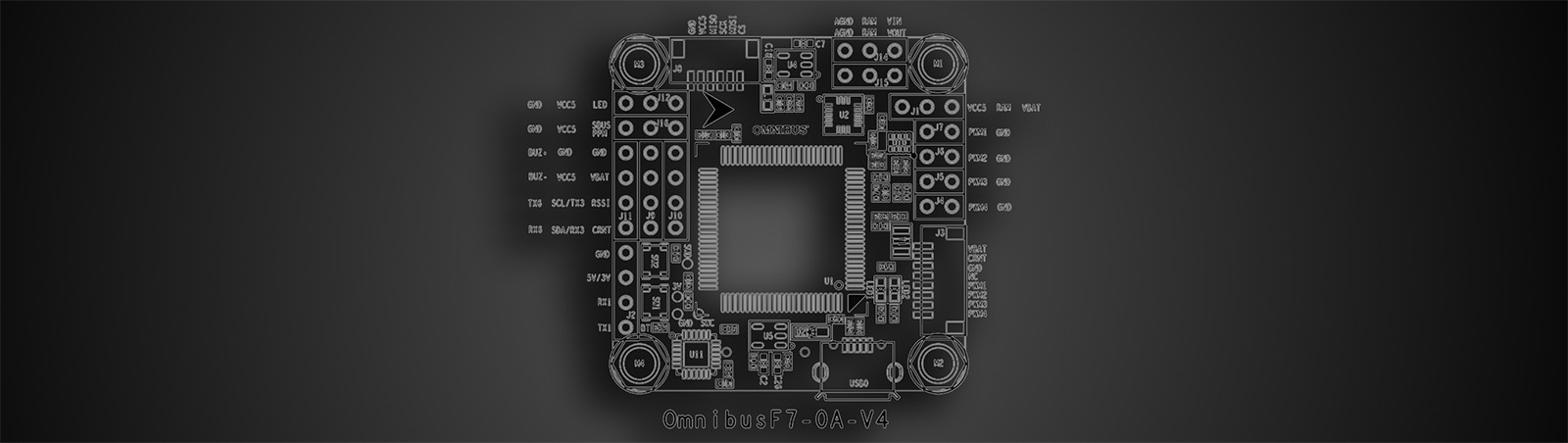
Omnibus F7 Flight Controller
I got my hands on a new STM32 F7 flight controller: Omnibus F7. Before we proceed, small note. I am a huge fan of F7 flight controllers. In a year, they will be a main line of high performance FC on the market. STM32F7 with built-in UART inverters solves so many issues STM32 F4 boards…
-
Omnibus F4 Pinout
Omnibus F4 is a new family of All-In-One (AIO) STM32F4 based flight controllers with integrated OSD (On-Screen-Display) for FPV purposes. Basically, it is Airbot F4 / Flip32 F4 with added MAX7456 and some minor tweaks.