Author: Paweł
-
GPS Racer: worklog #8 – sonar test platform
I honestly admit, that my 6″ quad (codename GPS Racer) was never very pretty. It was just ugly with that GPS tower on the front. Today it got even uglier: I’ve equipped it with HC-SR04 sonar connected via I2C bus (ATtiny85 to the rescue). Why, you might ask, have I done something so useless? Answer…
-
FC Soft Mount With Adhesive Pads FTW!
I will not try to proof if you should soft mount a flight controller on a racing drone. I will only say, that few months ago I was against it, but lately I changed my mind. Stronger motors, stronger magnets, more torque, more speed and out of nowhere, incredible amount of noise can be fed…
-
AnyFC F7 and DIY buzzer for INAV
Because both original and Banggood clone of AnyFC F7 flight controller and missing buzzer support, its usefulness is somehow limited. There is no dedicated pin and driver. Next release of INAV (1.7.2) will finally solve this problem by reusing Motor #9 output as buzzer output. But, some additional hardware will be required. To be precise,…
-
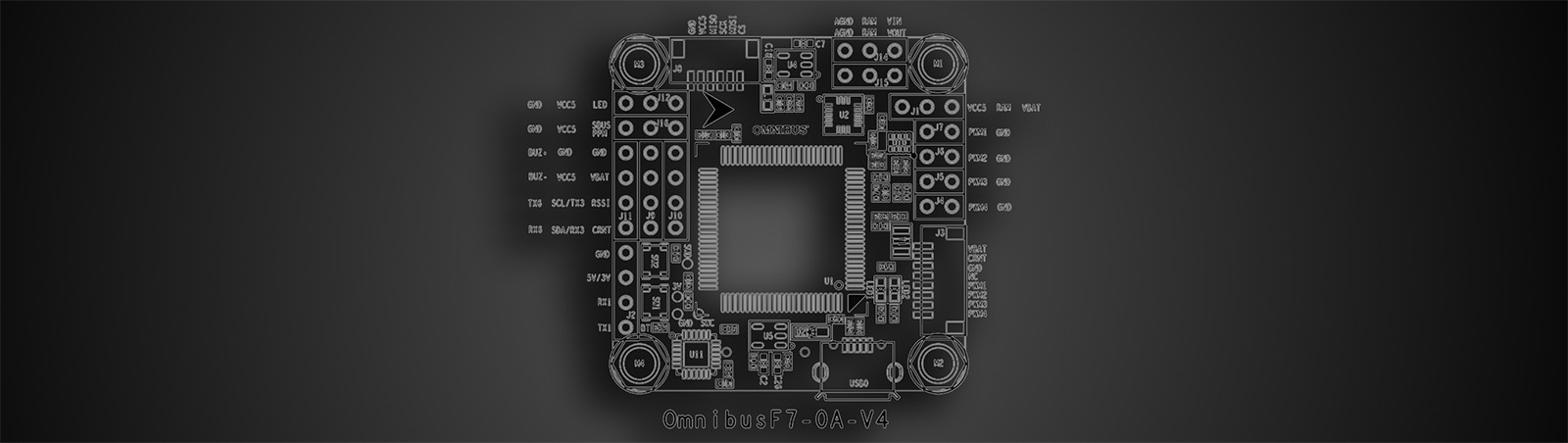
Omnibus F7 Flight Controller
I got my hands on a new STM32 F7 flight controller: Omnibus F7. Before we proceed, small note. I am a huge fan of F7 flight controllers. In a year, they will be a main line of high performance FC on the market. STM32F7 with built-in UART inverters solves so many issues STM32 F4 boards…
-
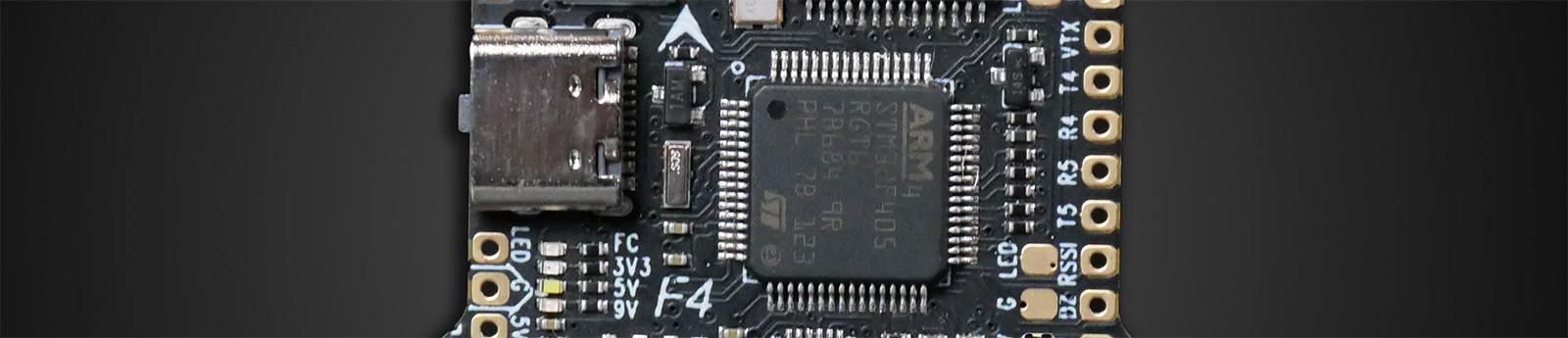
Hardware revisions of Omnibus F4 flight controllers
The Omnibus F4 series is one of my favorite flight controllers. Two of my quads are flying thanks to them. They might not be the best or the famous ones, but they get the job done. And that is what counts. Unfortunately, they are not free of faults (and what is?) and each next revision…
-
GPS Racer: worklog #7 – flying at night
Like promised, I took GPS Racer equipped with night vision camera RunCam Night Eagle and IR projectors for a night flight. And it worked. Not as good as I expected, but worked. RunCam Night Eagle is sensitive enough to fly at night. Just like that. As long as there is at least some light, you…
-
Pitot tube is coming to INAV
One of the things that INAV was missing, was a decent support for Pitot tubes, or more generally speaking, airspeed sensors. Autonomous flight, or landing, without knowledge about airspeed can easily lead to a stall. Stall can lead to crash. A crash leads to rebuild. Rebuild of big airplane is a nightmare. Although, for some…
-
GPS Racer: worklog #6
I have to admit, I have a talent for building ugly looking quadcopters and airplanes. But this is a step forward. This is the ugliest quadcopter I’ve ever seen… just look at it… So ugly, that almost beautiful… Those two “eyes” are IR projectors and that almost not visible FPV camera is RunCam Night Eagle……
-
Gyroscope and filtering video tutorial – Episode 3
In this episode I talk about: How to analyze Blackbox log for gyro noise How to find frequencies for gyro and Dterm notch filters in INAV, Cleanflight and Betaflight