-
INAV 1.7.2 has been released
“Let’s do the news….” and INAV 1.7.2 has been released yesterday. Besides new targets (MATEKF405, Alienflight F7, SP Racing F3 NEO) there are few quite important changes: ADC channel to function mapping is now configurable. Any ADC using function (battery voltage, current, RSSI) can be assigned to any ADC pin. You smoked Current pin? No…
-

HC-SR04 is crap and there is nothing you can do about it…
Only few days ago I mentioned that I started to reintroduce sonar support to INAV. When DigitalEntity told me that popular HC-SR04 is crap I did not belived him. I expected that “official” 4m range on a noise-machine aka quadcopter is unrealistic, but data I recorded today clearly shows: HC-SR04 is crap and is absolutely…
-
Flight Controller Soft Mount – is it worth it?
Is it worth to soft mount flight controller? Are gyro pads I recommended here better than rubber standoffs? I feel that they are better, but I do not have any solid data to prove it. So I can only tell, that I find them better and that is all. But, I can answer the question…
-
And the most popular flight controller for INAV is…
Did you ever wondered what is the most popular flight controller? Hardware I mean. I can tell you 🙂 OK, maybe it will not be a full truth, since I have data only from INAV, but assuming that distribution for Betaflight and Cleanflight is similar, we might know what is happening… Important, this is not…
-
GPS Racer: worklog #8 – sonar test platform
I honestly admit, that my 6″ quad (codename GPS Racer) was never very pretty. It was just ugly with that GPS tower on the front. Today it got even uglier: I’ve equipped it with HC-SR04 sonar connected via I2C bus (ATtiny85 to the rescue). Why, you might ask, have I done something so useless? Answer…
-
FC Soft Mount With Adhesive Pads FTW!
I will not try to proof if you should soft mount a flight controller on a racing drone. I will only say, that few months ago I was against it, but lately I changed my mind. Stronger motors, stronger magnets, more torque, more speed and out of nowhere, incredible amount of noise can be fed…
-
AnyFC F7 and DIY buzzer for INAV
Because both original and Banggood clone of AnyFC F7 flight controller and missing buzzer support, its usefulness is somehow limited. There is no dedicated pin and driver. Next release of INAV (1.7.2) will finally solve this problem by reusing Motor #9 output as buzzer output. But, some additional hardware will be required. To be precise,…
-
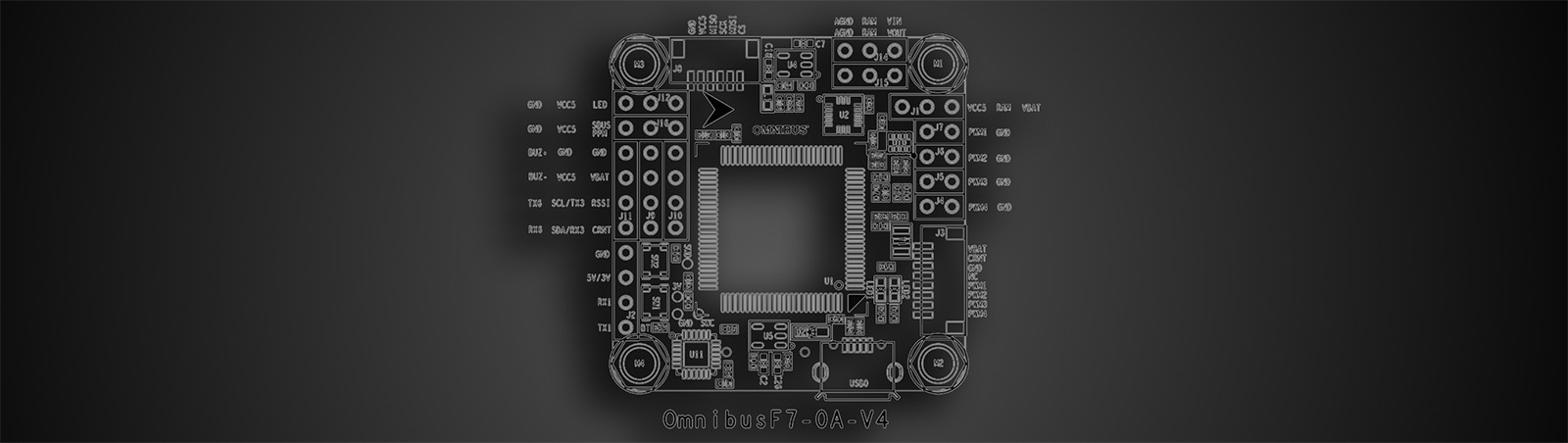
Omnibus F7 Flight Controller
I got my hands on a new STM32 F7 flight controller: Omnibus F7. Before we proceed, small note. I am a huge fan of F7 flight controllers. In a year, they will be a main line of high performance FC on the market. STM32F7 with built-in UART inverters solves so many issues STM32 F4 boards…
-
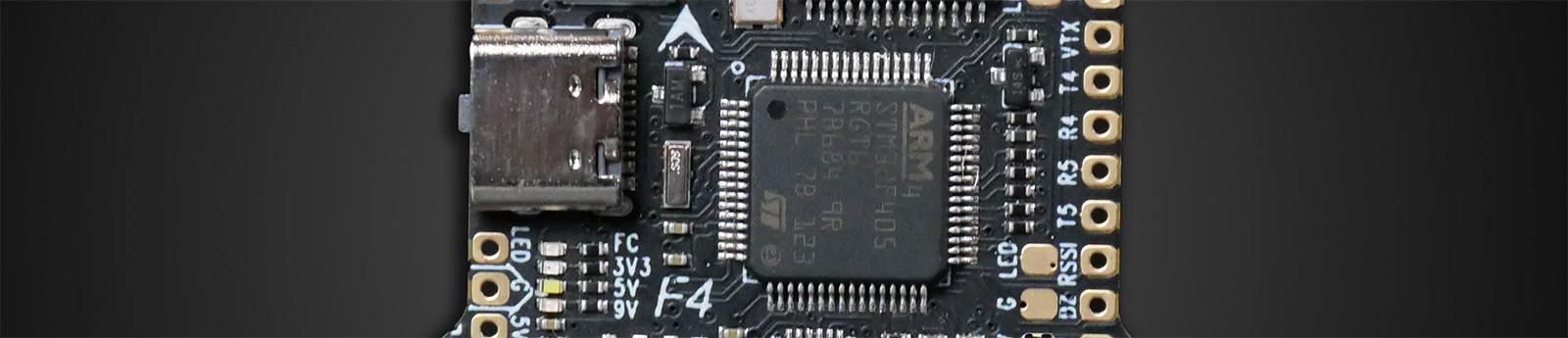
Hardware revisions of Omnibus F4 flight controllers
The Omnibus F4 series is one of my favorite flight controllers. Two of my quads are flying thanks to them. They might not be the best or the famous ones, but they get the job done. And that is what counts. Unfortunately, they are not free of faults (and what is?) and each next revision…